

新闻详情
电动葫芦控制电路的实验原理
来源:本站 作者:匿名 发布:2021-4-15 修改:2021-4-15
隶属:企业资讯 点击:1589
电动葫芦是一种起重量较小,结构简单的起重机械,广泛应用于工业企业中小型设备的吊运、安装和修理工作中。由于其体积小,占用厂房面积较少,故使用灵活方便。
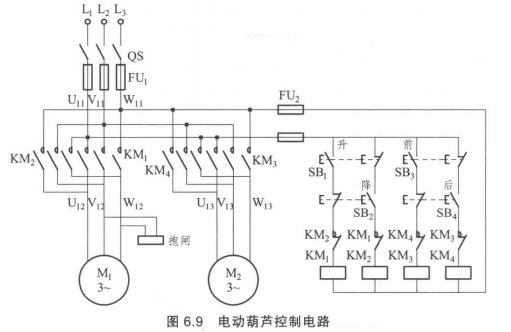
电动葫芦由提升机构和移动装置构成,由各自的电动机拖动。电动葫芦的控制电路如图6.9所示。
图中,SB1、SB2分别为吊钩升、降按钮,通过接触器KM1、KM2控制电动机M1正反转,使吊钩作升降运动。SB3、SB4分别为葫芦前,后移动按钮,通过接触器控制电动机M2正反转,拖动葫芦在水平面内沿导轨前后移动。
升降机构动作如下:按下SB1,接触器KM1得电,主触点闭合、电动机M1正转,电磁抱闸松开,吊钩上升。升到预定位置,松开SB1、KM1断电,吊钩停止上升,电磁抱闸断电,其闸瓦贺龙对电动机M1制动,使其迅速停止。欲使吊钩下降,只需停下按钮SB2,接通接触器KM2控制电缆,KM2得电,主触头闭合,松开电磁抱闸,电动机M1反转,吊钩下降。当下降到要求高度时,松开SB2,KM2断电释放,断开主电路,电磁抱闸因断电而对电动机制动,下降动作迅速停止。
移动机构动作如下:按下前进按钮SB3,接触器KM3线圈得电动作,主触头闭合,电动机M2通电正转,使电动葫芦前进;松开SB3,KM3断电释放,电动机M2断电,移动机构停止运行。欲使电动葫芦后退,按下SB4,接触器KM4得电动作,接通电动机M2反转电路,M2反转,使电动葫芦后退;松开SB4,电动葫芦停止后退。
上一个新闻:电动葫芦施工过程的安全与环保控制
下一个新闻:缓冲器的型号和规格有哪些?
同类新闻
- 2023-12-29 电动葫芦智能监控系统的构成
- 2023-12-6 电动葫芦内置式高度检测装置的优点
- 2023-11-22 手拉葫芦使用前需要做哪些准备工作?
- 2023-10-30 圆柱转子平面制动电机在钢丝绳葫芦上明显优势
- 2023-10-10 环链电动葫芦双限位控制形式的选择
- 2023-9-27 国外发达国家先进企业起重设备的发展历程